Undistort Video and Gaze Data
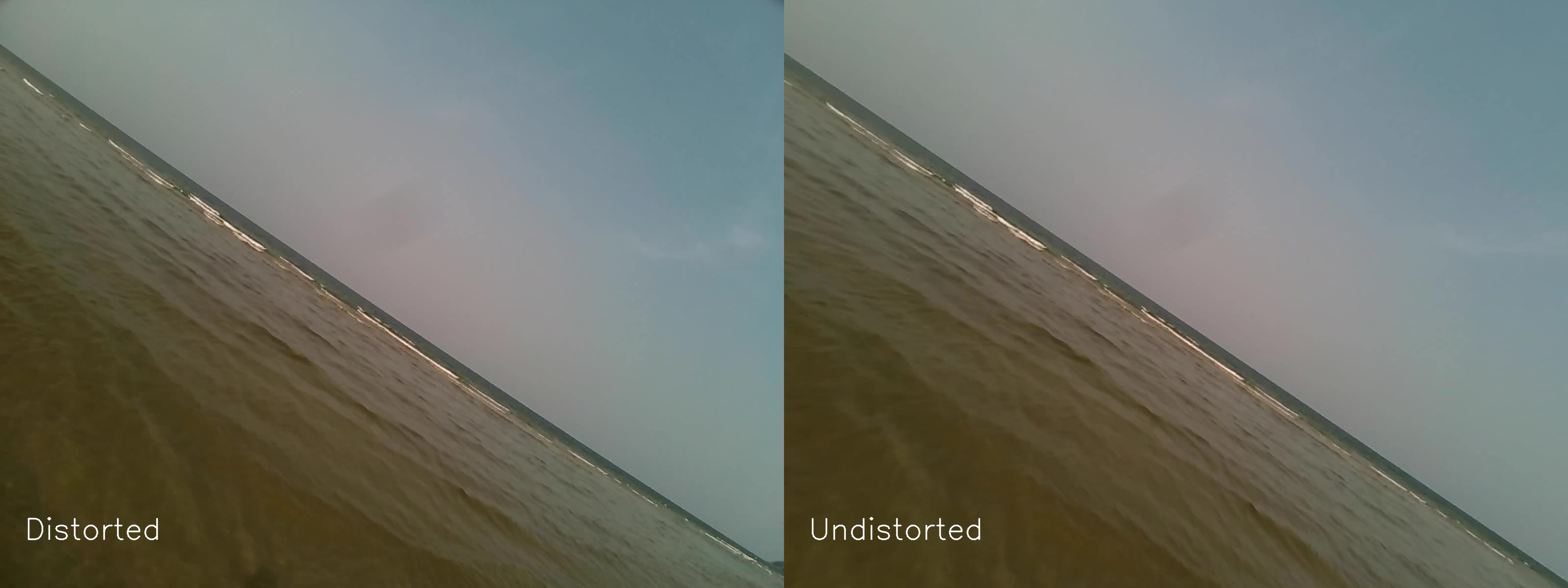
A circumstance that often arises in wearable eye tracking setups is the presence of distortions on the scene camera. The type of lenses used, with their wide-angle characteristics, allows for a broad field of view, enabling the capture of more information within a single frame. However, this advantage comes at the cost of introducing distortions to the image.
While we account for them in Pupil Cloud processing — such as when we're aligning gaze data onto reference images or surfaces — it's important to note that the data you download will be in its original, unaltered form. We offer you the possibility to download the undistorted video using the Video Renderer Visualization, but this is not the case when using the Realtime API or raw data, where you may want to correct it by yourself.
When Is It Beneficial To Correct for Lens Distortion?

The lens distortion in Neon's scene camera is not very strong, but correcting for it can have benefits for some applications. The undistorted image may be a more realistic or appealing representation of the observer's visual perspective (e.g. parallel lines will also be parallel in the undistorted image). Some computer vision algorithms also perform better on undistorted images.
How To Correct for the Lens Distortions?
In this tutorial, we will cover how to read the provided intrinsic and extrinsic camera parameters and correct for the lens distortions in Neon's scene camera. We will also show you how to undistort the gaze data, so that you can map the gaze position onto the undistorted scene camera video.
We will be using Python and OpenCV to perform the undistortion, but the same principles apply to other programming languages and libraries.
Requirements
To follow this guide, you will need to have the following libraries installed on your python environment:
- OpenCV for image processing and undistortion
- Numpy for numerical data manipulation
pip install opencv-python numpyReading From the Cloud Download JSON File
We measure the intrinsics and extrinsics parameters from the cameras for you, such that you do not need to do it by yourself. If you are using the Cloud download format, you can find the intrinsic parameters in the scene_camera.json file which you can read using the following function:
def read_from_json(path):
with open(path, "r") as f:
data = json.load(f)
return dataWhere path points to the scene_camera.json file. Then, we will store the scene camera matrix and distortion coefficients in variables for later use.
calibration = read_from_json(path)
K = np.array(calibration["camera_matrix"])
D = np.array(calibration["distortion_coefficients"])[0]Reading From the Raw File
Click To See How To Read It From the Raw Formats
If you are using the RAW data, this data is also stored there. The calibration parameters are stored in a binary file, and you can read it using the following function:
def read_instrinsics_neon(path):
return np.fromfile(
path,
np.dtype(
[
("version", "u1"),
("serial", "6a"),
("scene_camera_matrix", "(3,3)d"),
("scene_distortion_coefficients", "8d"),
("scene_extrinsics_affine_matrix", "(4,4)d"),
("right_camera_matrix", "(3,3)d"),
("right_distortion_coefficients", "8d"),
("right_extrinsics_affine_matrix", "(4,4)d"),
("left_camera_matrix", "(3,3)d"),
("left_distortion_coefficients", "8d"),
("left_extrinsics_affine_matrix", "(4,4)d"),
("crc", "u4"),
]
),
)Where path points to the calibration file, which is located in the same folder as the raw data with the name calibration.bin. Then, we will store the scene camera matrix and distortion coefficients in variables for later use.
calibration = read_instrinsics_neon(path)
K = calibration["scene_camera_matrix"][0]
D = calibration["scene_distortion_coefficients"][0]Understanding the variables
Scene camera matrix (K)
A 3x3 matrix representing the intrinsic parameters of the camera. The camera matrix contains information about the focal length, principal point, and skew of the camera, defined as follows:
K = [[fx, 0, cx],
[0, fy, cy],
[0, 0, 1]]where:
- fx and fy are the focal lengths expressed in pixels. They measure the distance between the camera sensor and the pinhole opening of the camera. As such, they determine the field of view of the camera.
- cx and cy are the coordinates of the principal point, which represents the optical center of the camera. It indicates the position of the image center in the image plane, usually close to the center of the image.
Read more about OpenCV convention here.
Distortion coefficients (D)
D = [k1, k2, p1, p2, k3, k4, k5, k6]where:
- k1 to k6 are radial distortion coefficients. They model the radial distortion caused by the curvature of the lens, making straight lines appear curved near the edges of the image.
- p1 and p2 are tangential distortion coefficients. They model the tangential distortion caused by the misalignment between the camera sensor and the lens, resulting in image distortions that are not radial.
Read more about OpenCV convention here.
Undistorting the video and gaze data per frame
Assuming we have our frame (in OpenCV) and gaze data, we can undistort it using the following code:
undist_frame = cv2.undistort(orig_frame, K, D)Where orig_frame is the original frame, K is the scene camera matrix, and D is the distortion coefficients. The function returns the undistorted frame.
Finally, this is how we undistort the gaze point:
xy_undist = cv2.undistortPoints(xy.reshape(-1, 1, 2).astype(np.float32),
K, D, P=K)
xy_undist = xy_undist.reshape(-1, 2)On the example below, we show the original gaze points overlaid ove the undistorted frame (in red) and the undistorted point positions (in yellow):


Use Neon with Pupil Capture
Use your Neon module as if you were using Pupil Core. Connect it to a laptop, and record using Pupil Capture.

Generate Scanpath Visualisations
Generate both static and dynamic scanpath visualisations using exported data from Pupil Cloud's Reference Image Mapper or Manual Mapper.
Automate AOI Masking in Pupil Cloud
Extend the capabilities of Pupil Cloud's AOI tool by automatically segmenting and drawing masks using natural language.